This documentation relates to version 7.4
If you are using an earlier version, please view the other versions of SHIPMA documentation and select the relevant version.
This is the home of the SHIPMA documentation.
On the top level documentation can be found on:
Product information for SHIPMA
Introduction SHIPMA model (version 7) The latest version of the fast–time simulation program SHIPMA is a joint development of MARIN’s nautical centre MSCN and Deltares. The combined contribution of these institutes leads to a fit for purpose program to simulate the manoeuvring behaviour of vessels in ports and fairways. In SHIPMA the vessels are steered by an autopilot which is capable of operating in the track keeping mode and the harbour manoeuvring mode, making it possible to perform typical harbour manoeuvres like turning, reverse sailing and berthing. | 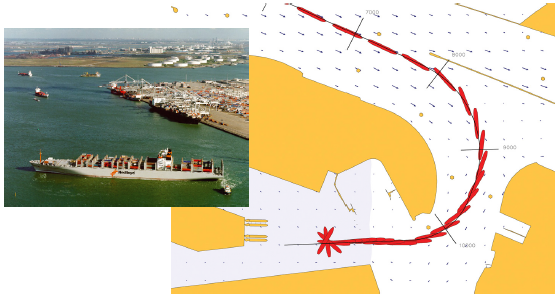 |
| SHIPMA applications The application of SHIPMA is primarily in port and fairway design, referring to both approach channels and inland waterways. According to PIANC [1] a first estimate of the required channel width based on their methodology has to be followed by ship manoeuvring simulations. | 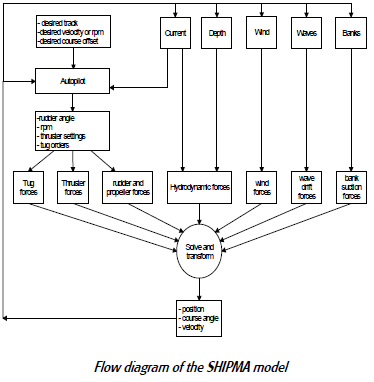 |
Methodology of SHIPMA useSHIPMA relies on the use of an autopilot, which also includes a tug and thruster allocation algorithm. The choice for using an autopilot rather than hands-on steering by a pilot or Master allows the engineer to clearly judge and compare the results of different simulations on technical and physical aspects. The use of an automatic pilot in desktop simulation assures repeatability and a consistent nautical assessment procedure. The hands-on mode often seen in other models (actively steering the ship over a chart displayed on a screen) would put a civil engineer in a position where he is in fact playing the role of a pilot or Master. Alternatively, one could ask a pilot to do the runs, but the chart display offered to him is rather different from his normal sailing practice. This will jeopardise the result of the manoeuvres. Furthermore, runs have to be repeated to guarantee consistency. | |
Ship characteristics The mathematical ship models, consisting of sets of hydrodynamic derivatives (Abkowitz type [2]), are specific for each ship. They are determined either by scale model test, through scaling from other models or by calculation (SURSIM [3]). Models can be chosen from an existing list of over 100 high-quality ship models covering the latest ship designs. Specific models can be made according to the client’s wishes. The models include wind coefficients, bank suction coefficients, second order wave drift forces and shallow water effects. | |
 |  |
| Example of an entry manoeuvre into the 'Sloehaven' Flushing, with an airialview of the port | |
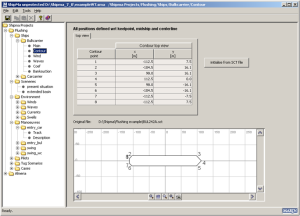
SHIPMA input and outputThe input of the SHIPMA model is organised through the Graphical User Interface. The Shipma GUI organises all data for a project in a hierarchical tree. A Shipma project tree consists of a number of subordinate “nodes”, each defining some aspect of the project:
Note that for this type of data Shipma offers the possibility of choosing for a simple set-up with constant wind, waves or current or to import self prepared environmental grids in which the number of grid points is practically unlimited. |
The main output consists of:
The track and the output data can be plotted using D3D-Quickplot. |
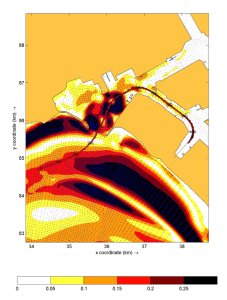
ExamplesIncluded are two examples of a computation with the new SHIPMA model. One example (see previous page) shows an entry manoeuvre into the ‘Sloehaven’, Flushing. The manoeuvre is executed under maximum current conditions, the current is computed with the delft3d-flow model and imported in SHIPMA, together with bathymetry and the results of wave penetration calculations. The 2 plots at the right show another example of an entry and berthing manoeuvre with a twin propeller twin rudder vessel equipped with a bow thruster. | 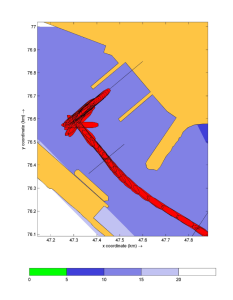 | 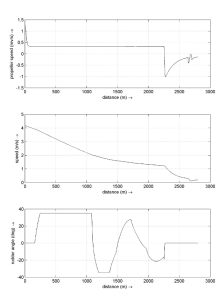 |
| Track plot and Data plot (forward speed, sideward speed and rudder angle) | ||
| SHIPMA is also capable of simulating inland waterway situations (picture left). Mathematical models are available for various types of ships. The algorithm for simulating tug assistance has been improved considerably. Tugs are capable of controlling the ship speed in combination with the track keeping mode (picture right). | |
 |  |
Computer requirements
| References[1] PIANC-IAPH Working Group II-30, APPROACH CHANNELS A guide for Design.
|
Addresses
| Deltares | MARIN/MSCN | |
|---|---|---|
| P.O. Box 177 | P.O. Box 28 | |
| 2600 MH Delft | 6700 AA Wageningen | |
| The Netherlands | The Netherlands | |
| Tel. : +31 152 858 585 | Tel. : +31 317 479 911 | |
| Fax : +31 152 858 582 | Fax : +31 317 479 999 | |
| E-mail : delftchess.info@wldelft.nl | E-mail : info@marin.nl | |
| Internet : www.wldelft.nl/soft/chess | Internet: www.marin.nl | |
 |  |
Overview
Content Tools